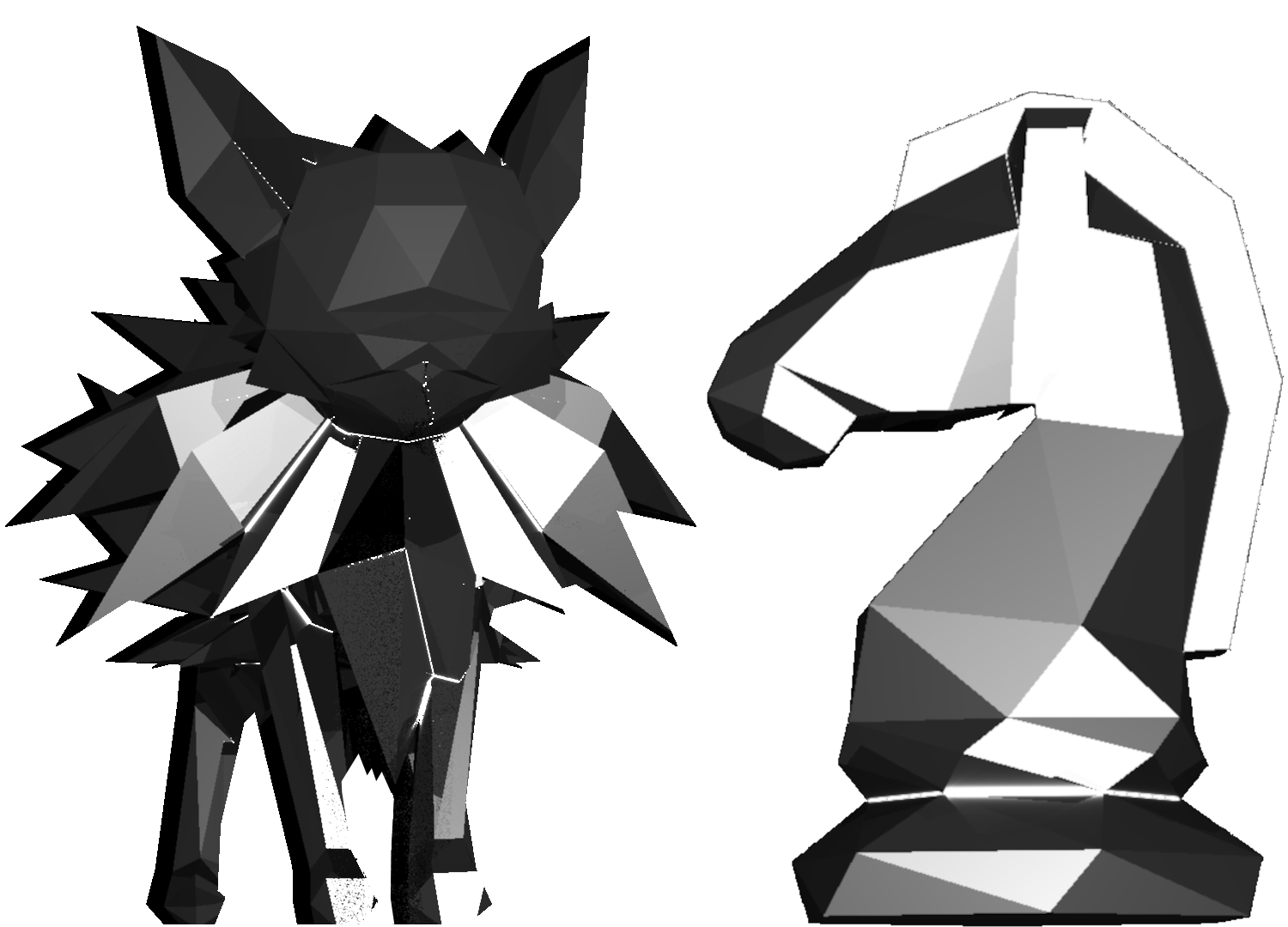
Polygon Renderer
A python demo that takes in an STL file, camera info and lighting info, then uses path tracing to render an image of the model.
Researched, developed and documented for my A-Level computer science programming project.
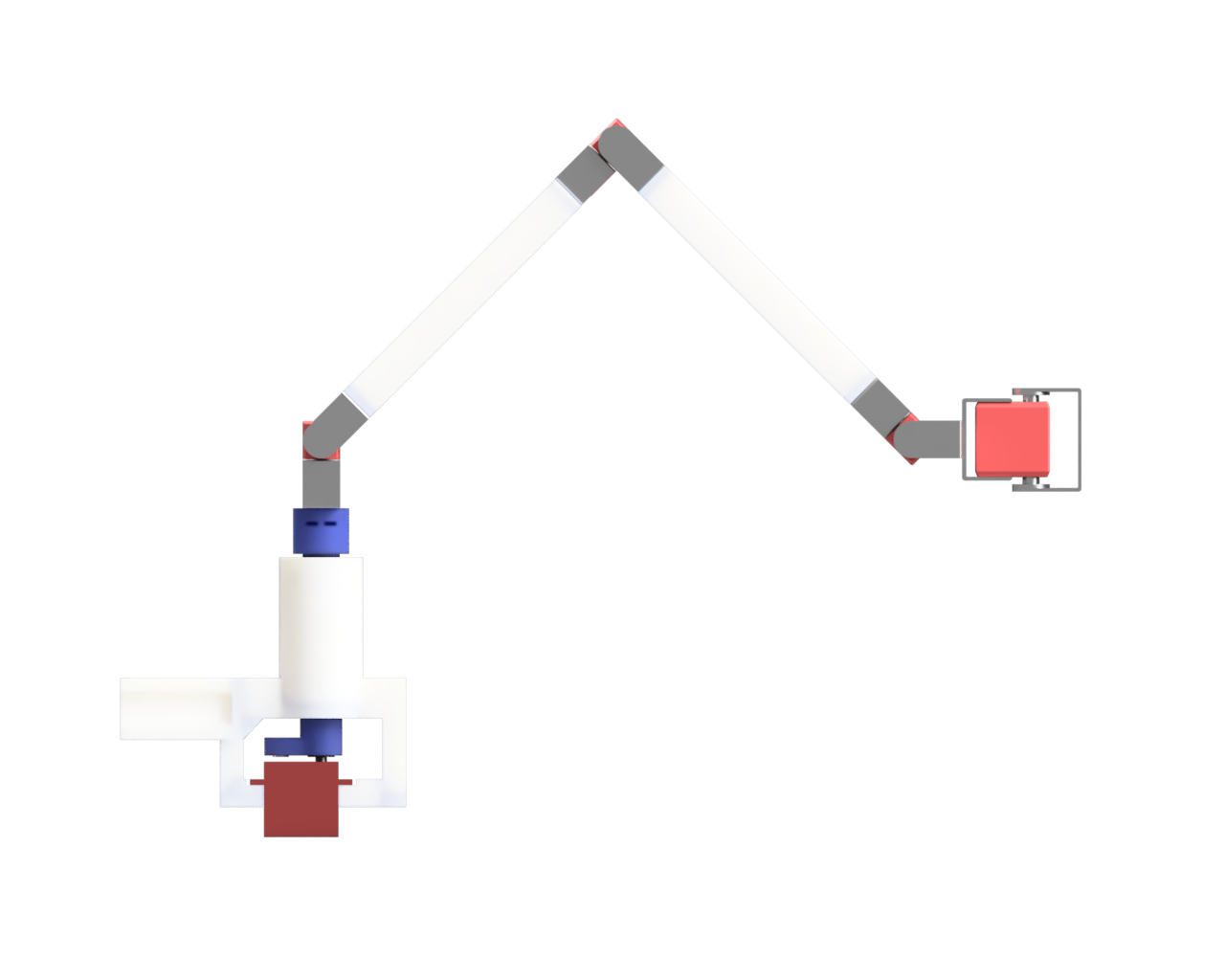
5 Axis Robot Arm V1
The arm is made up of servo motors of varying sizes, each connected with 3D-printed segments. A 3D-printed base provides a strong connection point for a bench vise and relieves loads on the longitudinally rotating servo. This is achieved by connecting the servo to the arm via a shaft held to the base by a bearing.
A significant part of this project was learning about and deriving the inverse kinematics for a variably sized robot arm. The location of each point is calculated sequentially from the target back to the origin. These points are then used to generate each servo's angle.
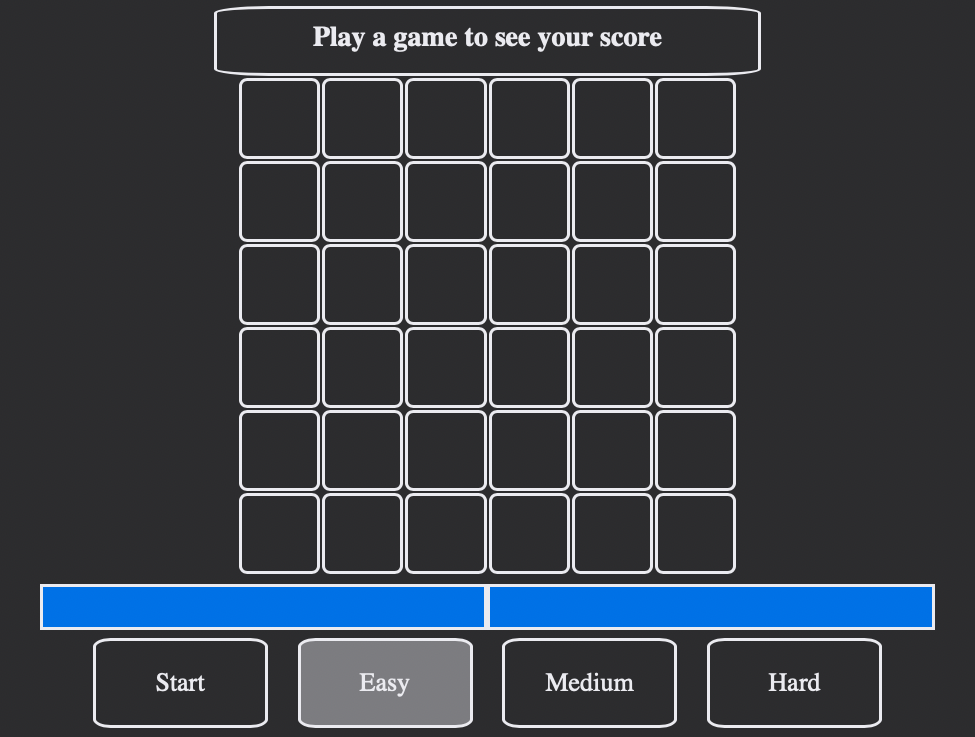
Visual Memory Test
A test of the user's visual memory. The user selects a difficulty level and starts the game. Once started, a pattern appears on a matrix, and the user has a set amount of time to memorize it. A progress bar indicates the remaining time. The user must then recall the pattern by clicking on the matrix's cells. They are given a fixed amount of time for this, as indicated by the progress bar. Once the round is over, mistakes are shown, and the user's score is updated.
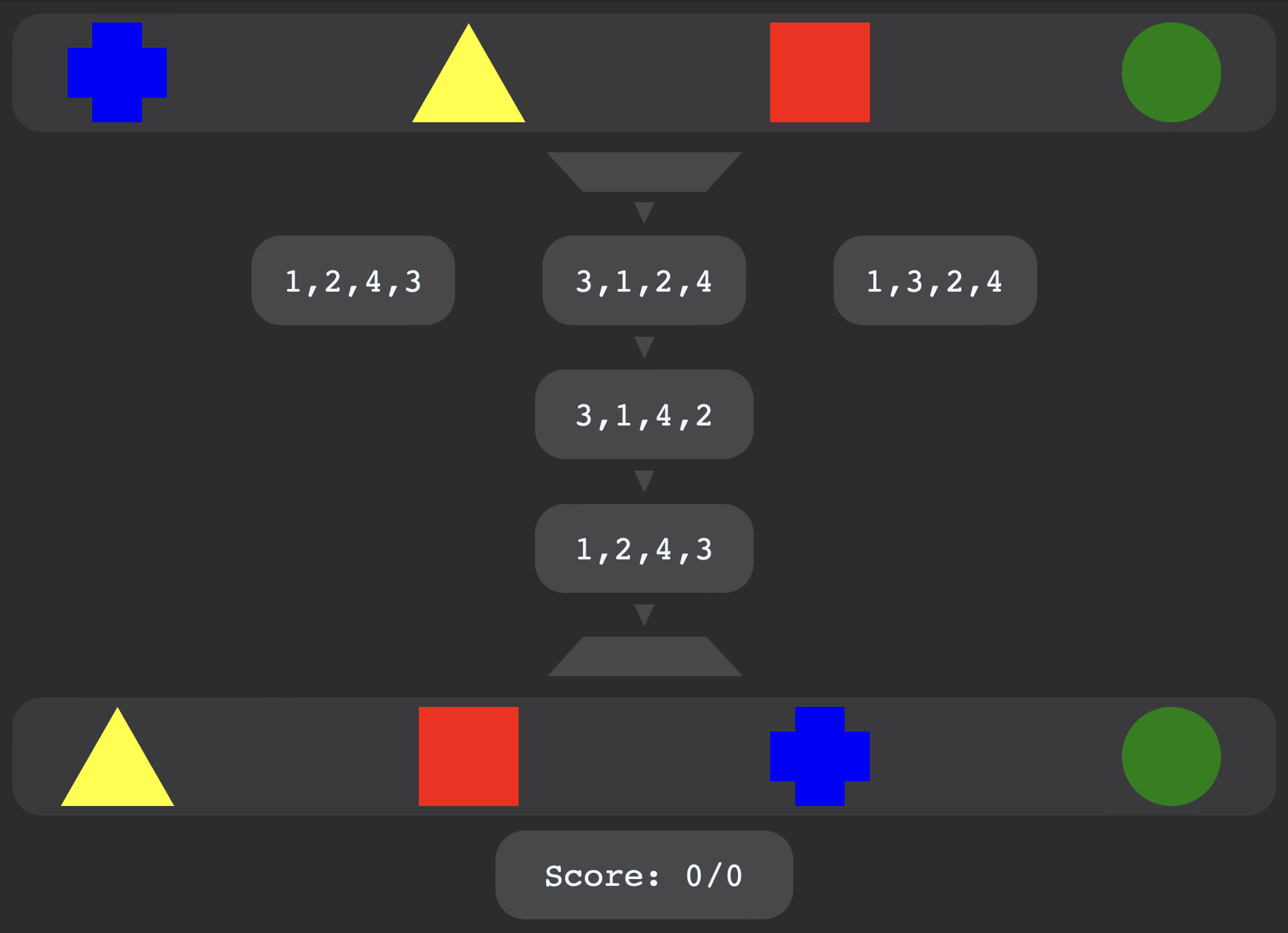
Switch Test
A test of the user's deductive reasoning. The user must quickly determine the keys used to scramble the order of a set of shapes. Their score updates dynamically throughout the test.